- Une liaison permet de maintenir ensemble différentes pièces d’un objet technique. Il s’agit d’une fonction mécanique élémentaire.
- Un organe de liaison est une pièce intermédiaire qui est parfois nécessaire pour assurer la liaison entre d’autres pièces.
Les liaisons et les organes de liaisons peuvent être indiqués dans le schéma de construction d’un objet.
On peut décrire une liaison à l’aide de 4 caractéristiques.
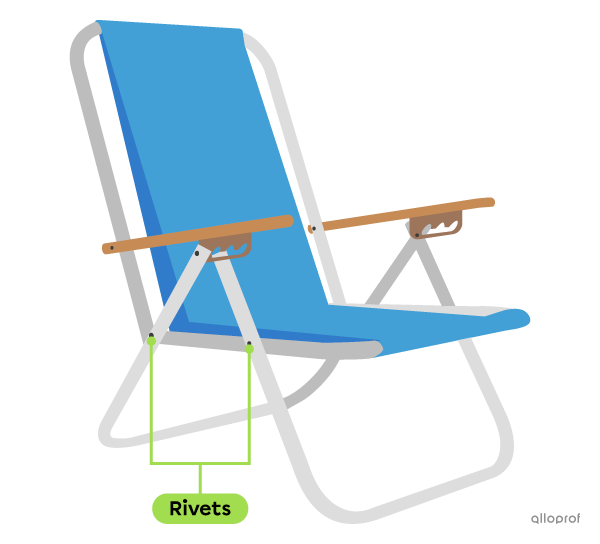
Par exemple, les tuyaux métalliques d’une chaise pliante sont liés entre eux par des rivets. Il s’agit d’une liaison indirecte, indémontable, rigide et partielle.
Chacune de ces caractéristiques provient de l’une des paires de caractéristiques suivantes.
Directe | Indirecte |
|---|---|
| Les pièces tiennent ensemble sans organe de liaison. | Les pièces sont liées grâce à un ou plusieurs organes de liaison. |
Exemples | |
 ozkan, shutterstock.com |  Gudman, shutterstock.com |
| La liaison entre le manche et la tige d’un tournevis est directe, car la tige est encastrée dans le plastique du manche sans qu’il y ait un organe de liaison. | La liaison entre un bouton et une chemise est indirecte parce que le bouton est lié à la chemise par l’intermédiaire du fil qui agit comme organe de liaison. |
Démontable | Indémontable |
|---|---|
| Il est possible de séparer les pièces liées sans les endommager ou endommager les organes de liaison. | Il est impossible de séparer les pièces liées sans les endommager ou endommager les organes de liaison. |
Exemples | |
 Cember Tech, shutterstock.com |  Gudman, shutterstock.com |
| La liaison entre une bouteille d’eau réutilisable et son bouchon est démontable, car il est possible de retirer le bouchon de la bouteille sans rien endommager. | Des gaines de plastique sont utilisées comme organe de liaison pour lier et protéger des fils électriques. Il s’agit de liaisons indémontables, car il est impossible de séparer les fils sans endommager la gaine. |
Élastique | Rigide |
|---|---|
Les pièces ou les organes de liaisons permettent un mouvement de rappel. Il y a mouvement de rappel lorsque les pièces liées reprennent leur forme ou leur position initiale à la suite d’une déformation ou d’un mouvement. Pour cela, il peut y avoir un dispositif de rappel, (ex. un ressort) qui assure le retour à la position initiale des pièces liées. | Les pièces ou les organes de liaison ne permettent aucune déformation ou aucun mouvement de rappel. |
Exemples | |
 tomeqs, shutterstock.com |  Krasovski Dmitri, shutterstock.com |
| Les touches d’un clavier d’ordinateur sont liées à un circuit imprimé par un organe de liaison en caoutchouc qui assure une liaison élastique. La déformation temporaire de l’organe de liaison permet à la touche de reprendre sa position initiale. | Un manche est lié à l’arrière du corps d’une guitare par des vis qui assurent une liaison rigide. En effet, les matériaux qui composent les vis ne permettent aucune déformation. |
Complète | Partielle |
|---|---|
| Aucune des pièces liées ne peut bouger indépendamment. | Au moins l’une des pièces liées peut bouger indépendamment des autres. |
Exemples | |
 Sorawit11, shutterstock.com | 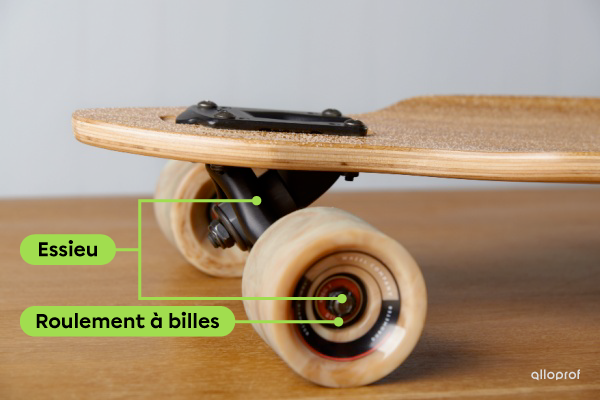 JIPEN, shutterstock.com |
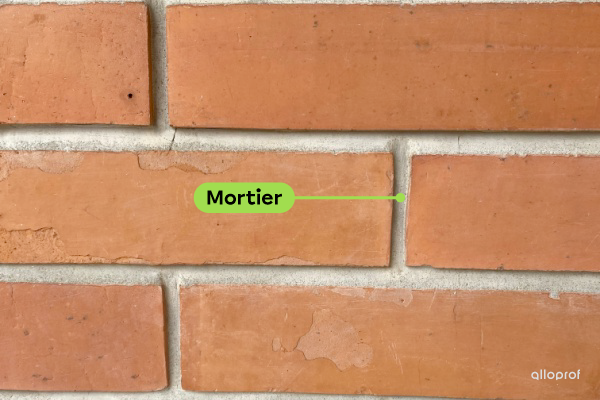
| Le mortier est un mélange de sable et d’eau qui, une fois séché, assure une liaison complète entre les briques d’un mur. En effet, le mortier ne permet aucun mouvement entre les briques. | Des roulements à billes assurent la liaison partielle entre les roues et les essieux d’une planche à roulettes. En effet, les roulements à billes permettent la rotation des roues autour des essieux. |